Patrick Noras
MS CS Student @
RPTU Kaiserslautern

MS CS Student @
RPTU Kaiserslautern
Featured Projects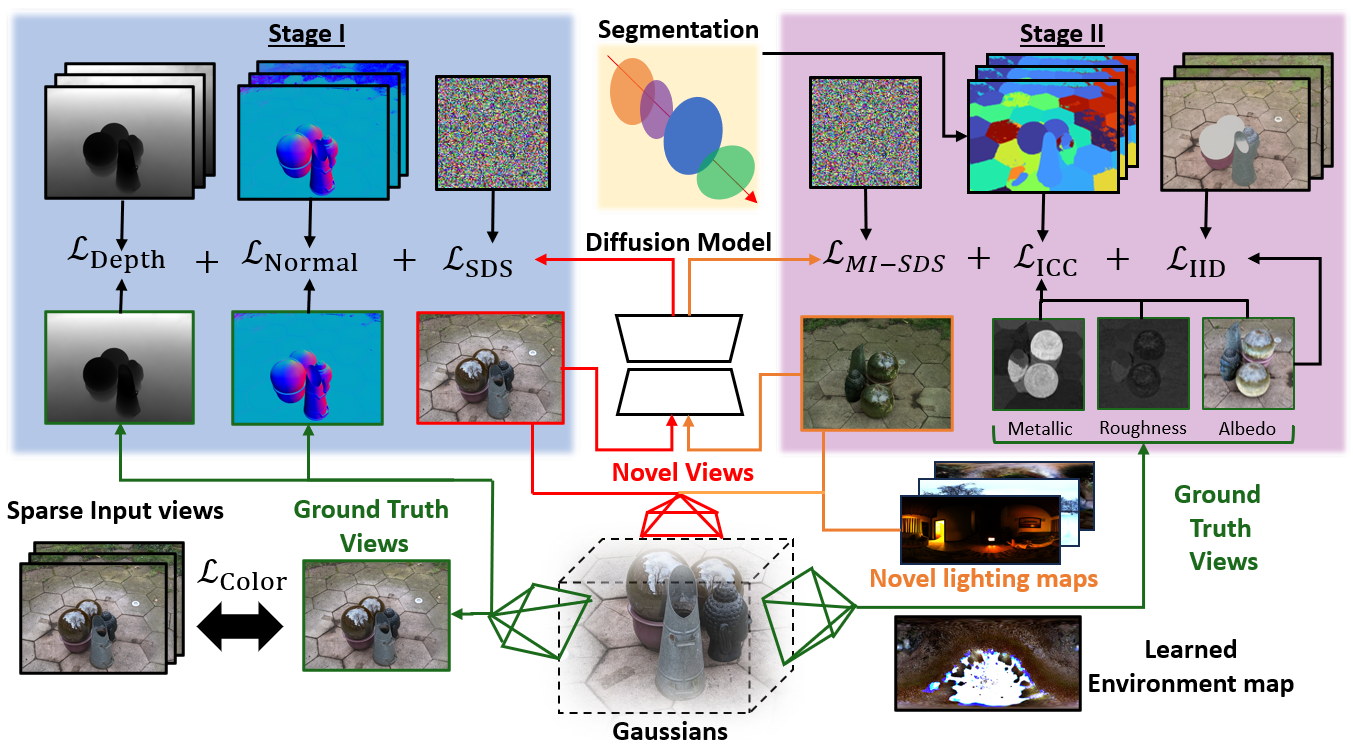
GAINS: Gaussian-based Inverse Rendering from Sparse Multi-View CapturesPatrick Noras, Jun Myeong Choi, Didier Stricker, Pieter Peers, Roni Sengupta GAINS is a Gaussian-based inverse rendering framework that uses learning-based priors to improve geometry and material recovery from sparse multi-view captures, achieving high-quality relighting and novel-view synthesis. 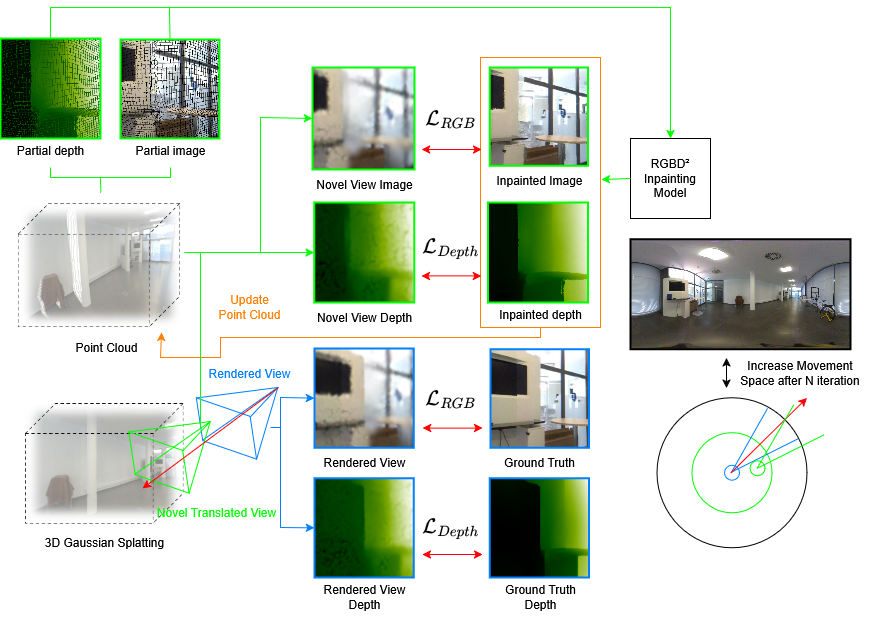
Monocular360° GSThis project introduces Monocular360° GS, a method for monocular panoramic image-based rendering that generates parallax through partial ground-truth views and uses inpainting to handle occlusions, achieving improved results on real-world scenes. 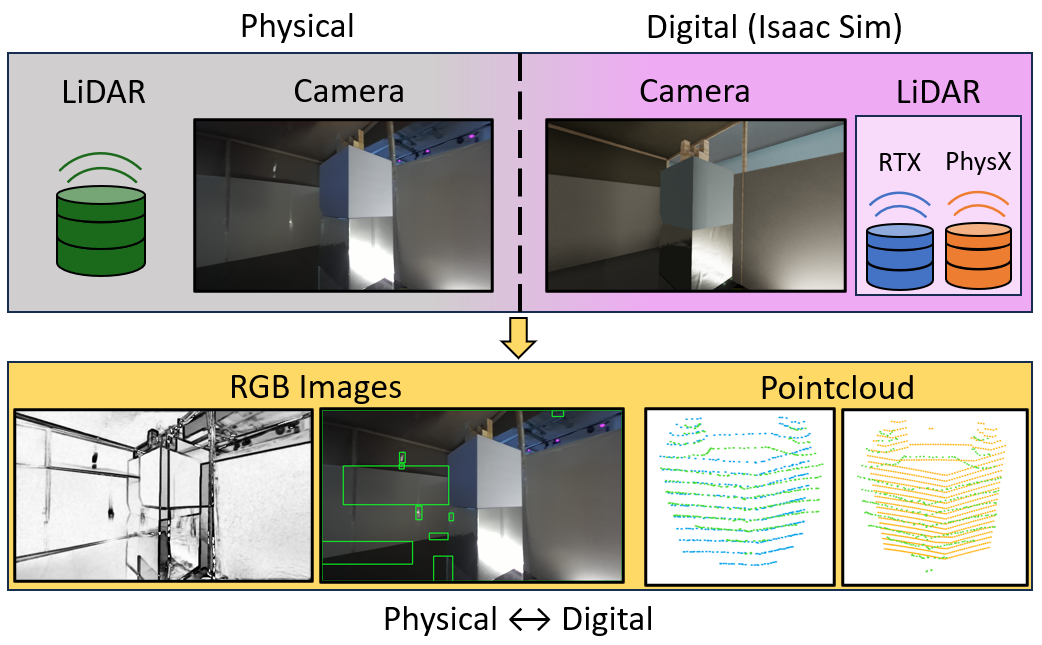
Performance and Accuracy Assessment of Nvidia's Omniverse Isaac Sim for Generating Synthetic Data from Real-world ScenariosI created this project as part of my undergraduate thesis to evaluate NVIDIA's Omniverse Isaac Sim for generating realistic synthetic stereo-camera images and LiDAR point clouds by comparing simulated sensor data to a real-world scene. |